令和6年度 工学部 機械工学コース3年「ロボットコンテスト2024」大会要項
競技内容
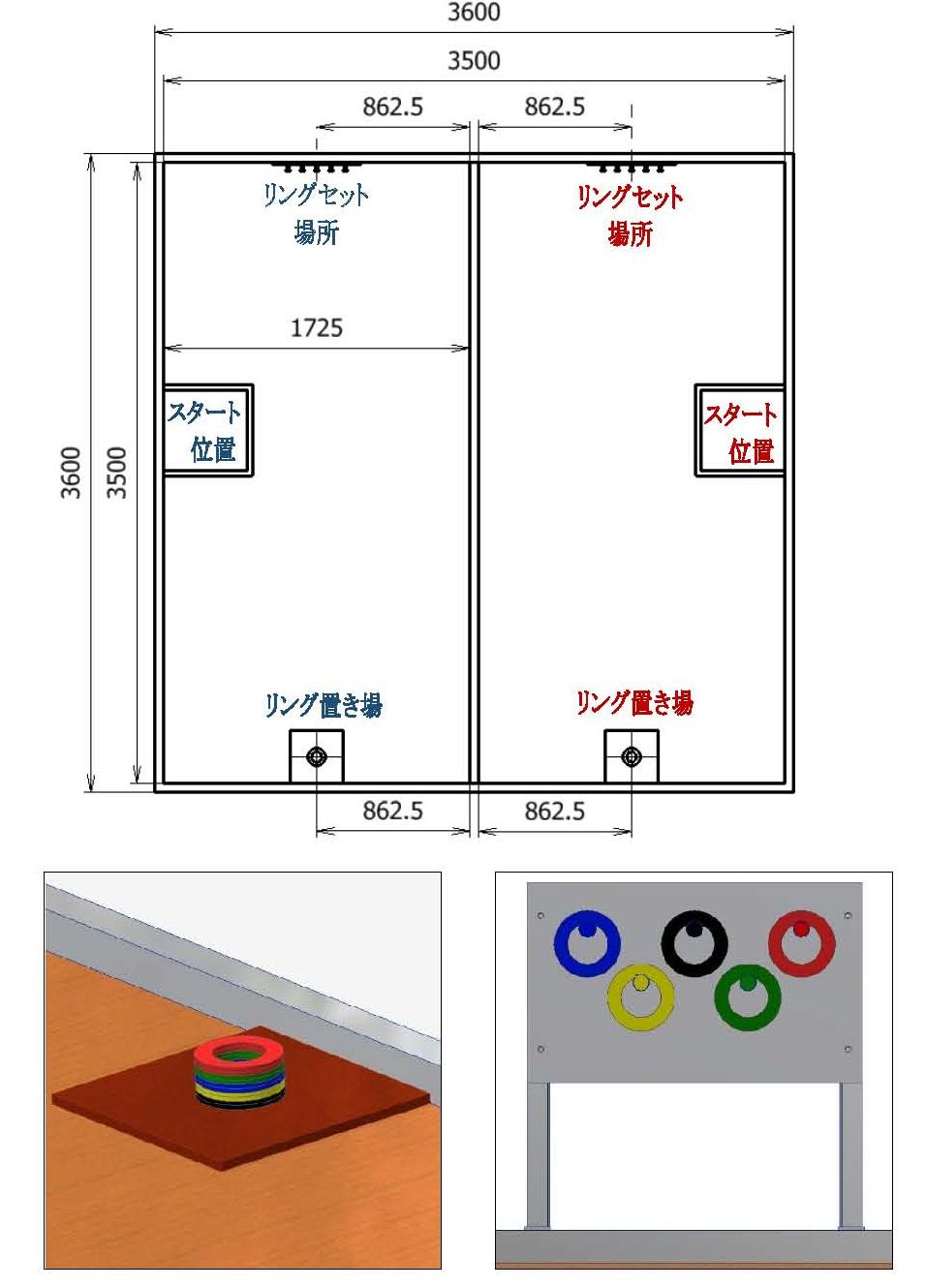
フィールド
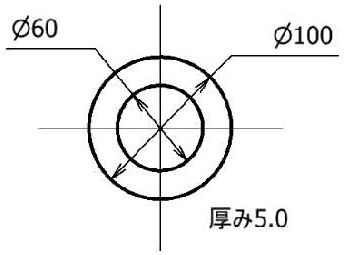
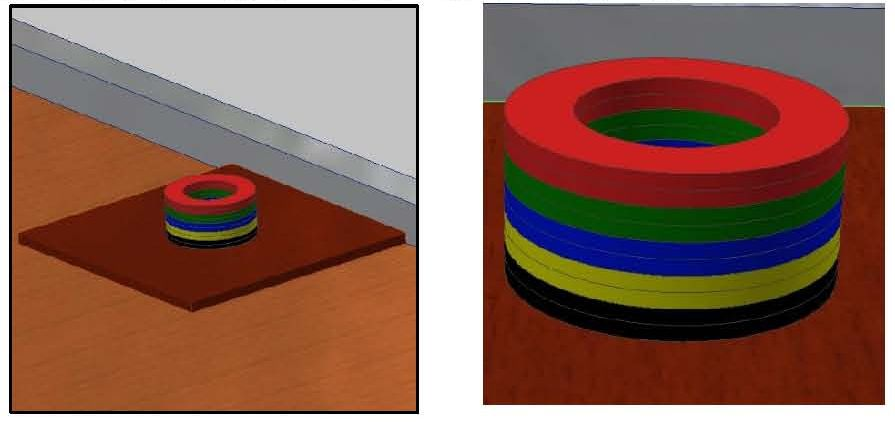
リング
リング置き場1
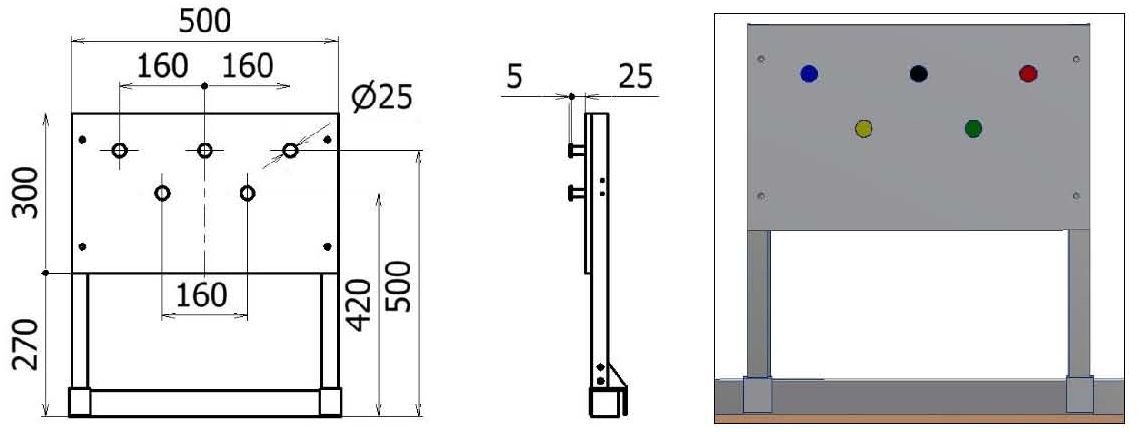
リングセット場所
競技方法
- ロボットを車検箱に収まる形で赤及び青のスタート枠内に置いた状態からスタートさせる。
- 競技時間は5分間。
- 競技時間内に色付きのリングを置き場から移動させ、セット場所の同じ色のピンに1枚セットする(同じピンに2枚セットしても1枚とみなす)。
- 各グループで予選リーグの全3試合を行い、上位2チームが決勝トーナメントへ進出する。
競技の勝敗
◎予選リーグ
セットしたリングを得点化し、全3試合の合計得点で順位を決める。・・・①
得点は以下とする。
上段→各2点、下段→各1点、リングとピンの色が合わない場合→0点
①の合計が同じ場合
完成させた時点での残り時間の合計が多いチームが上位。…②
①②の合計が同じ場合
最初のリング設置時の残時間の合計が多いチームが上位。
1試合ごとに予選リーグのルールで勝敗を決める。
ロボット規格
- 300mm×450mm×高さ350mmの車検箱に収まること。
(※ スタート後収縮変形で寸法が変わってもかまわない。ただし複数個に完全分離した形状は反則となる。) - ロボット操作には、本競技大会が規定するコントローラーを用い、ロボット1台に付き二台(2ch×2)とする。
- ロボットの移動には、規定のタイヤ・ホイールを使用すること。その主駆動に使用するモーターは、提供されたモーター以外使用禁止とする。
- 周波数設定用受信クリスタルは、ロボット外部に取り付け、容易に交換可能な位置にする。
- ロボットは完全自走と無線操作が切り替え可能なものとする。
- 電源は支給するバッテリーのみとする。(12V、6.5A、縦65mm×横150mm×高さ95mm、重量2.8kg)
その他
- ロボット1台につき、モーターは4個、タイヤ・ホイールは2個支給するが、必要に応じて増やしてもよい。
- 受信用クリスタル、無線操作用プロポは競技終了後直ちに係員に返さなければならない。




